
【机情无限 精彩毕设】机械2025届毕业设计(论文)中期检查优秀案例分享第二十期——两船过驳波浪补偿机构设计与控制仿真

学生姓名:丁杨左斌
班 级:机械(茅班)2021-01班
指导教师:宋兴国
毕设题目:两船过驳波浪补偿机构设计与控制仿真


一、概况
1.选题意义
我国海洋工程建设目前正进入快速发展期,研发可靠的海洋工程装备、突破关键核心技术意义重大。船舶在海洋上受波浪激励,会出现六个自由度的不规则运动,因此波浪补偿技术对于提高海上作业效率和安全性至关重要。过驳作业是船对船的货物换装作业,在海洋工程中占有重要地位。虽然“动对静”场景下的波浪补偿系统已广有研究和应用,但针对两船过驳的“动对动”场景仍缺乏较有效的波浪补偿机构。
本毕业设计拟设计并仿真验证一种新型吊式两船过驳波浪补偿机构和相应的控制策略,使其能够在复杂波浪环境下,有效补偿波浪引起的扰动和误差,提高两船过驳作业的效率和安全性。通过运动学和动力学建模,验证机构设计的合理性和可行性;通过仿真分析和验证动力学模型的正确性,并通过模拟验证控制策略的有效性,为后续的实验和实际应用提供理论基础。
2.任务分解
①文献综述与现状调研:广泛查阅国内外相关文献资料,调研现有波浪补偿系统的原理、应用现状及其存在的问题,了解海上起重机波浪补偿技术的发展,为后续设计提供理论依据和技术参考。
②机构构型设计:提出一种新型的吊式波浪补偿机构构型方案,考虑其在两船过驳的“动对动”场景下的适用性,确保机构结构合理、功能可靠。
③运动学和动力学建模:对所设计的波浪补偿机构进行详细的运动学和动力学分析,建立准确的数学模型,为后续仿真验证和性能评估提供基础。
④控制策略设计:对所设计的波浪补偿机构设计合理的控制策略,并通过后续仿真模拟验证控制策略的有效性。
⑤仿真分析与验证:利用专业仿真软件,对机构的动力学模型进行控制仿真分析,验证模型的正确性和测试机构的补偿性能,分析其在工作海况下的稳定性。
⑥论文撰写与完善:整理研究过程中的资料和成果,撰写毕业论文,详细阐述设计思路、建模方法、仿真分析结果等,并对设计进行总结与展望,为后续研究提供参考。
二、已完成工作
已完成基本的文献调研,对国内外研究现状及课题背景形成较为完整的了解,并且对目标有了较清晰的定位,完成领域内重要综述文章的翻译。

图1 部分翻译成果展示
提出了四绳悬挂的机构具体构型,对具体应用的两船过驳场景完成了基于SolidWorks和Microsoft office的三维场景绘制,完成各固结坐标系的定义。
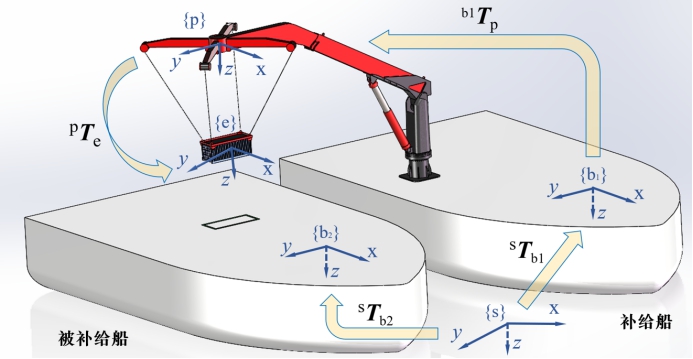
图2 场景及坐标系定义示意图
完成了机构的几何矢量建模,建立了基于旋量的机构的运动学模型,基于牛顿欧拉法建立了“静对动”场景的动力学模型。
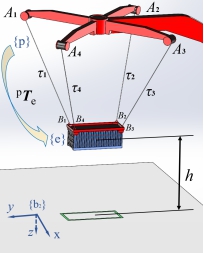
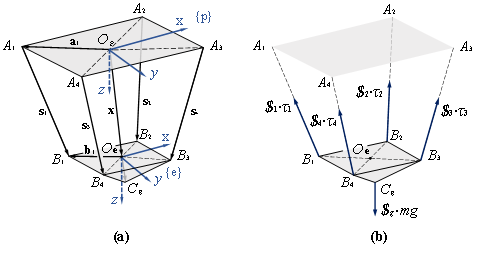
图3 机构局部放大示意图 图4 (a)机构几何矢量定义 (b)动平台受力分析
完成了机构的正逆运动学计算和机构的逆动力学计算,普遍基于最小二乘法。期间完成了对欧拉角-角速度转换的推导,对惯性张量的坐标变换的推导等。在正运动学计算方面采用了牛顿拉夫逊迭代法。
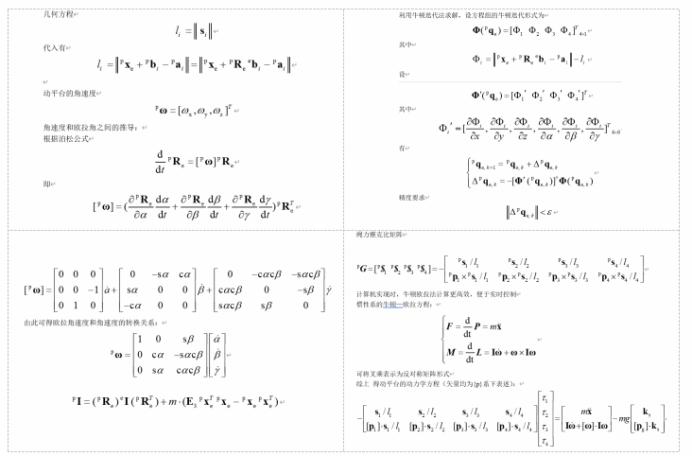
图5 部分运动学/动力学推导展示
通过MATLAB编程和Adams仿真部分验证了机构“静对动”场景下正逆运动学模型、动力学模型的正确性。
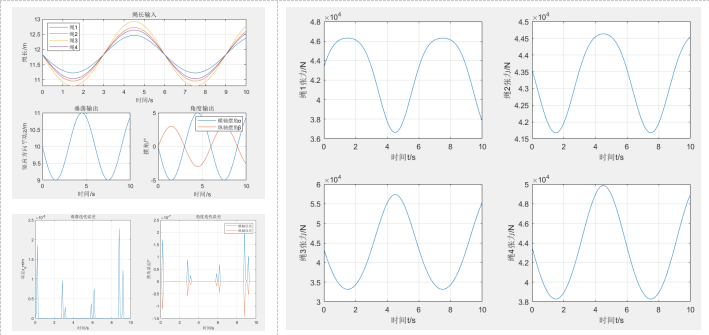
图6 部分MATLAB图表结果展示
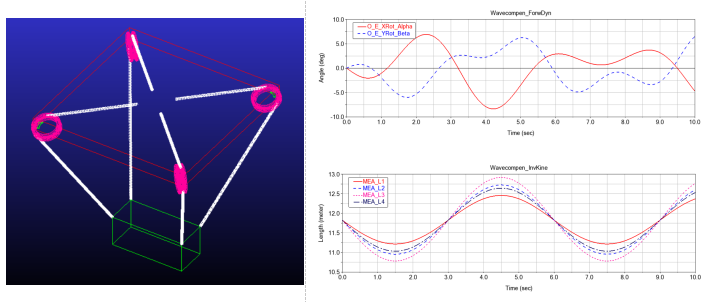
图7 Adams模型及部分仿真结果展示
三、下一步工作计划
目前在动力学上,建立的模型和软件模拟的结果还有一定的偏差,需要查证是模型建立有错还是在模拟上有疏忽。后续检查并修正动力学模型,并推广至 “动对动”情形。
采用的机构属于欠约束,正向控制时在横纵摇的补偿上产生一定震荡。后续要针对重心和实际补偿情况,对工作空间做探讨并对具体尺寸做优化考虑,并且完成对控制策略的设计,细化系统控制框图,并通过仿真验证控制策略的有效性。对于系统控制的验证将尝试MATLAB和Adams的联合仿真。

问题一:动平台限制了几个自由度?在正向仿真时哪些自由度会产生震荡?
回答:设计的是一种绳驱动机构,绳驱动机构通过n根绳能够限制n-1个自由度,我所设计的四绳悬挂构型对末端动平台限制了3个自由度,期望控制的是升沉、横摇、纵摇,即z移动,xy旋转三个自由度的运动。由于是欠约束机构,无反馈的输入在未限制的自由度上很容易产生震荡,根据仿真结果震荡主要产生在3轴旋转上。合理推测三轴移动相互解耦,但三轴旋转有一定耦合,而构型只对三轴旋转做出了两个约束。后续将通过对工作空间的探讨和控制策略的设计来消减震荡。
问题二:既然正向输入会产生非唯一解,如何保证对末端控制的有效性?
回答:非唯一解是因为机构有多种位姿可以满足绳长限制(因为仅提供4个约束),但欠约束不代表不可控。我们可以考虑简单的数绳吊起物体的情景,物体受绳拉力和重力作用,在合理的绳长下其平衡位置是唯一的。只要控制上能够通过合适的反馈消减其势能引起的“摆动”,就能确保受控的动平台尽可能减少震荡并满足期望位姿。

中期恰让我稍稍停下,对自己前一段时间的理论研究、推导计算、仿真分析等成果做了一次小总结。也许这么摆出来感觉工作量还不算少,持续的努力带给自己很多长进,有点小小欣慰。对于本科毕业设计,应该最后可以不错地收尾,但我未来的追求远不止于此。对于更深入的核心理论,更先进的原理和方法,还应当不懈钻研学习并勤于思考,武装好自己以在领域做出有份量的创新突破。
路漫漫其修远兮,吾将上下而求索。