
【机情无限 精彩毕设】机械2025届毕业设计(论文)中期检查优秀案例分享第三十期——动态传递误差信号中齿轮故障特征频率的分布研究

学生姓名:杜世博
班 级:机械(茅班)2021-01班
指导教师:张新
毕设题目:动态传递误差信号中齿轮故障特征频率的分布研究


一、概况
1.选题意义
行星齿轮传动系统具有结构紧凑、传动比大、功率分流平顺性好等优点而被广泛应用在汽车、风力发电机、轮船、直升机等设备中。但是大量服役的行星齿轮减速器在交变载荷、复杂工况等因素的影响下不可避免的发生齿轮损伤,包括齿面点蚀、磨损、裂纹、断齿等故障形式,对行星齿轮减速器传动特性、运行品质造成不利影响。在对故障的齿轮传动系统进行动态传递误差信号的分析时,其故障特征频率分布范围主要分布在低频区域,与振动信号的故障特征频率分布范围并不相同。为了探明齿轮系统中故障特征频率的分布范围不同的原因,从动力学角度推导故障响应的产生以及故障响应与特征频率之间的关联。研究有助于探明基于传动误差技术的故障诊断机理,指导实际应用中故障诊断技术的选择,帮助工程师和技术人员更准确地诊断和解决齿轮系统的故障问题。
2.任务分解
(1)系统调研国内外有关齿轮故障检测技术的相关文献,明晰齿轮故障诊断技术的发展历程与研究现状,通过广泛查阅资料,梳理国内外在该领域的研究脉络,明确不同阶段的齿轮故障诊断关键成果、主流方法技术,从而了解领域全貌,为后续研究提供必要的理论基础。
(2)掌握基于动态传递误差技术在齿轮故障诊断中的应用:深度剖析这一技术应用于齿轮故障诊断的流程、要点与优势,学习相关文献所记录的操作流程,并熟悉如何运用动态传递误差技术精准诊断齿轮故障,把握应用的核心技巧。
(3)MATLAB数值仿真计算:势能法求解时变啮合刚度,编写相关代码,得出不同裂纹深度下的刚度数据;学习相关动力学建模知识,进行行星齿轮动力学模型搭建,编写MATLAB代码进行相关运算,求解运动方程,对所得GDTE信号进行初步处理。
(4)ADAMS多体系统动力学仿真及实地实验:利用ADAMS进行多体运动学仿真,搭建全柔性模型,初步验证数值计算结果正确性;开展实地实验,得出相关实际数据与理论数据比对,调整误差系数及相关参数,修改优化代码。
(5)总结与文档撰写:总结设计过程中的方法、技术和实验结果,撰写完整的 毕业论文。
二、已完成工作
1.相关文献的搜集整理及阅读工作。
图 1 相关文献整理
2.行星齿轮系统动力学模型搭建。
利用集中质量法,对相关齿轮结构进行简化,确定构建三行星轮,18自由度的行星轮系动力学模型。
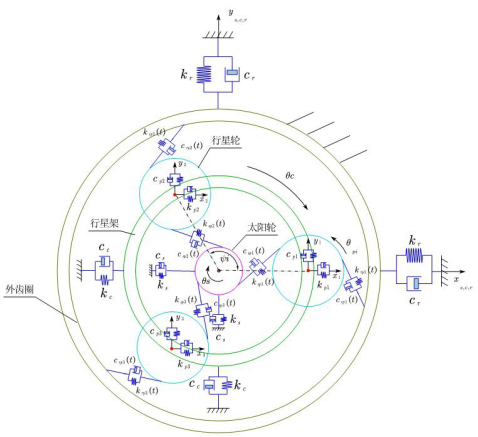
图2 行星齿轮系统动力学模型
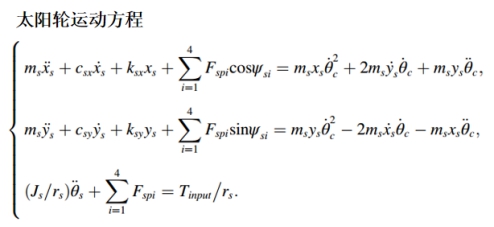
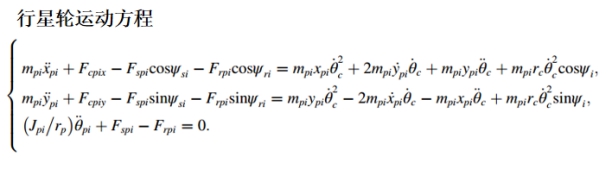
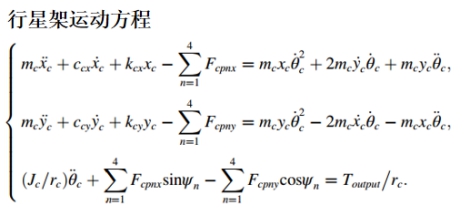
3.行星轮系中各部件运动方程
行星齿轮系统各部件的运动方程,包括太阳轮、行星轮、行星架、内齿圈四部分。其中X,Y分别为x、y方向上的位移,θ为角位移,角标s、pi、c、r分别表示太阳轮、第i个行星轮、行星架、内齿圈。
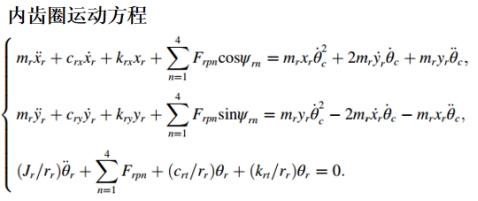
4.时变啮合刚度求解及相关代码编写
势能法求解时变啮合刚度,计算并得出相关的啮合刚度曲线
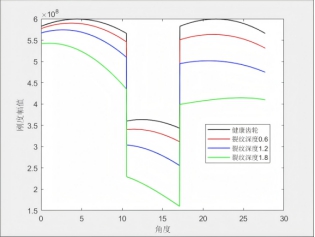
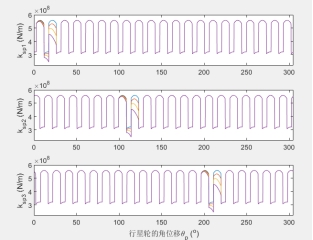
图3 时变啮合刚度
5.行星齿轮系统动力学方程推导及GDTE响应相关代码编写
利用MATLAB中的ode15s函数对运动方程进行求解,得到GDTE响应
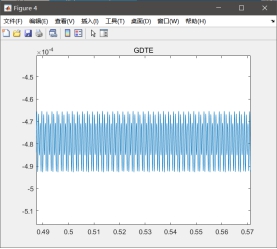
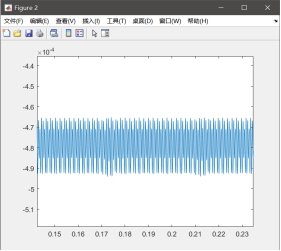
图4 健康齿轮GDTE响应 图5 裂纹深度0.6齿轮GDTE响应
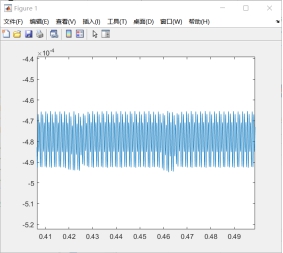
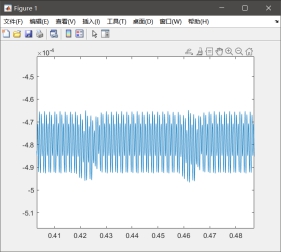
图6 裂纹深度1.2齿轮GDTE响应 图7 裂纹深度1.8齿轮GDTE响应
对四组GDTE波形分别进行傅里叶快速变换(FFT)得到其频谱图。
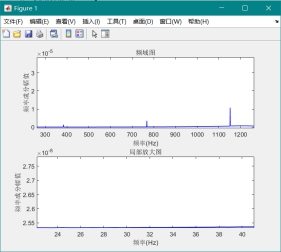
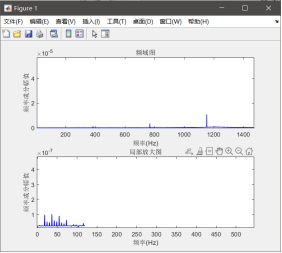
图8 健康齿轮频谱图 图9 裂纹深度0.6齿轮频谱图
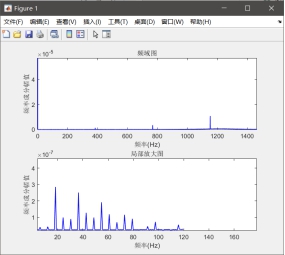
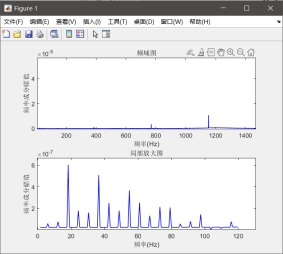
图10 裂纹深度0.6齿轮频谱图 图11 裂纹深度0.6齿轮频谱图
6.ADAMS多体动力学仿真
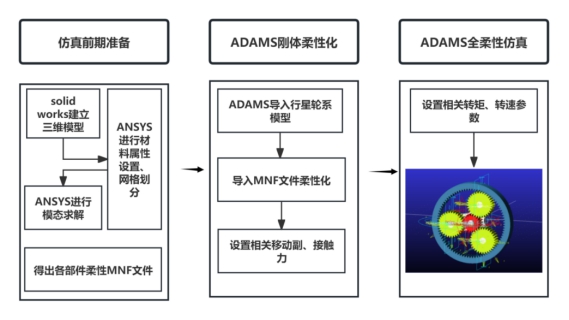
图12 ADAMS多体动力学仿真流程图
三、下一步工作计划
1.结合ADAMS仿真结果和开展实地实验的基础上对代码进行优化,具体流程如下图所示。根据实地实验的所得数据,进行相关处理,结合现有程序的相关输出内容,对现有程序当中的一些误差系数等进行优化调整
2.整理仿真结果及实验数据,总结技术方法,尽快完成毕业论文的撰写工作。

问题一:所搭建的18自由度行星齿轮系统动力学模型,分别是哪18个自由度?
回答:行星齿轮系统主要是由太阳轮、行星轮、行星架、内齿圈四个部分组成,因而18个自由度分别是太阳轮、三个行星轮、行星架、内齿圈共6个部件x、y方向上的位移和自身的转动共三个自由度组成,合计18个自由度。
问题二:讲述ADAMS仿真的柔性化过程及在做仿真时遇到了哪些困难?
回答:首先是利用Solid Works进行行星轮系统各部件及整个系统的三维模型搭建,再将模型导入ANSYS中进行相应的模态求解,最后以MNF格式得出柔性体文件,再将行星轮系统全部导入到ADAMS当中,将其各部件进行柔性化替代,再进行仿真。
仿真时遇到的主要困难:仿真计算量十分庞大,电脑计算需要消耗大量时间,参数设置也较为困难,后续的数据处理流程也较为繁琐。考虑合理减少ANSYS中模态阶数,学习一些新方法替代ADAMS中的齿轮副啮合设置。

时光荏苒,回顾过去这段时间本人所作的毕设相关工作,不仅让我历经了挑战与成长,收获了宝贵的知识与经验,也让我从这一过程中有了诸多体会和感悟。
在确定毕设题目后,我进行了大量的文献查阅整理工作,深入研读国内外相关研究资料。通过这些,我初步构建起齿轮故障诊断的理论基础,了解到行星齿轮的相关动力学特性、动力学建模的专业知识。同时,我系统学习了各类软件如MATLAB、ADAMS的使用,为我之后的毕设工作先打下一定的基础。再到后来,我顺利完成了行星齿轮系统动力学模型的搭建,并书写出各部件的运动方程,将其以代码形式体现,最终也得出了较为满意的响应波形图。
然而,在研究进程中,我遇到了不少困难。不仅包含对毕设题目的理解误差,也有着对最终目标实现的茫然。既有软件使用上、代码编写上的各种问题,也有仿真设置时出现的参数错误。好在有张新老师的悉心指导以及孟凡善师兄的支持帮助,不仅让我明确了我的研究目标,也让我一次次攻克了研究过程中的诸多困难,使我能够出色地完成毕设的大部分工作。
在后续的工作中,我将继续按计划稳步推进各项任务,完善之前工作中存在的问题,确保高质量地完成毕业设计,为本科阶段的学习交出一份优异答卷。