
【机情无限 精彩毕设】机械2025届毕业设计(论文)中期检查优秀案例分享第三十二期——基于直流无刷电机的两轮平衡车设计

学生姓名:范昌硕
班 级:交控2021-01班
指导教师:童勇鑫
毕设题目:基于直流无刷电机的两轮平衡车设计


一、概况
1.选题意义
本篇毕业设计的目标是设计一款两轮平衡车,该平衡车应具有优异的动力学性能和控制精度,故而其应具备如下特性:
(1)车体机械结构兼顾稳定性与便携性,可进行快捷收纳。
(2)与遥控器手柄通信、实现实时控制命令采集(也即可以将人的手部动作指令实时映射到车体机械结构姿态和运动姿态上,以满足多种场合的实际应用需求)。
(3)兼顾好成本与质量,通过尽可能地利用现有标准件完成车体搭建,并且通过改善装配关系获得更高性价比。
(4)面对复杂路况,依靠OPENCV视觉上位机的识别完成基本的避障功能。
(5)采取无刷电机闭环控制算法,完成车体姿态的实时调整。
(6)具有高自由度,可加装各类检测模块,充当丰富的无人检测功能以提高其实际运用的广泛性。
2.任务分解
(1)通过查阅背景文献,了解动态两轮平衡车目前的发展情景与其在无人侦察及运输的应用现状,研究的背景意义,熟悉国内外关于两轮平衡车动态姿态系统针对实时路况和任务目标做出的姿态控制算法,以及针对该算法领域的研究。
(2)通过查阅背景文献,了解轮足平衡车目前的发展情景与其现在的应用现状,研究的背景意义,熟悉国内外关于闭环五杆运动链动力学参数的研究现状。规划平衡车的整体框架与结构。
(3)从平衡车实用需求出发,罗列平衡车需完成的各个功能,针对上述功能完成对直流无刷电机控制算法的整体大框架的设计。
(4)阅读相关电机控制文献,并重点学习电机的角度闭环PID控制以及LQR姿态控制。
(5)完成机械结构的总体方案设计(五杆闭环轮足以及平衡车车体两个部分),包括每部分总体结构、装配关系与不同零部件的加工方式和部分部件的力学仿真。
(6)完成各个零部件的加工及装配,烧录代码,借助调试工具,根据调试结果,反复调整控制算法中的参数,达到更为精确稳定的控制效果。
(7)撰写完善毕业设计论文,准备答辩材料,参加毕业答辩。
二、已完成工作
1.目前已完成两代车体的SW机械建模及装配,轮足电机沿用大疆M3508大疆,已完成对其基于CAN总线的PID力矩控制;轮腿电机采用宇树公司开发的关节电机,相较于减速比为1:19的大疆M3508电机,减速比为1:6.33的宇树电机在内部采取了谐波减速器,因此在较低转速的情况下,可以维持约为22.5N*m的稳定扭矩,故而可以更好地适应闭环五连杆驱动关节的性能需求。宇树关节电机基于RS485通信协议,目前已基于串口转RS485模块完成了对电机的控制。
2.车体大部分结构采取4mm碳纤维材料,二代车体于轮腿部分加入了4mm厚度的ABS塑料的3D打印结构,在不增加车身重量的同时大大增强了轮腿的抗扭性;活动关节处采取了内部滚动轴承,外部3D打印件过盈配合包覆的结构,在确保基本的轴向承力(由滚动轴承提供)与关节活动性的情况下,改善了活动关节的径向定位性能,极大地提高了闭环五连杆轮腿机构的整体稳定性。
3.姿态检测由维特智能公司开发的九轴陀螺仪(包含角度、加速度、角加速度),基于波特率为961200的串口通信,目前已完成了由官方标准库例程到STM32HAL库的移植工作。
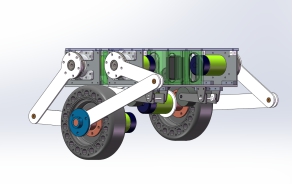
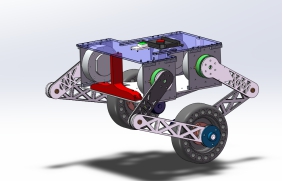
图1 两代车体的SW建模
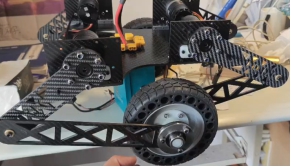
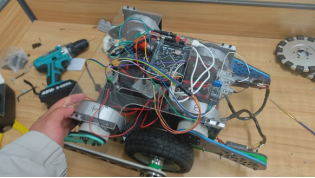
图2 改进前后的两代车体实物
图3 Simscape仿真模型
三、下一步工作计划
1.下阶段将系统性学习LQR控制算法,基于MATLAB的SIMULINK模块,完成对车体运动的动力学仿真,通过链表的形式,对关节电机的实时力矩实现前馈控制,以提高其抗干扰能力和姿态稳定性。
2.目前已购入逻辑分析仪,将结合DAP无线串口调试助手,对单片机端软件程序进行优化与排查,通过引入串口DMA绕开CPU中断控制,减少数据接收时中断次数,减少程序阻塞率,并将通过合理调整中断响应优先级和抢占优先级,提高数据接收性能,改善程序运行稳定性。
3.将通过基于SBUS协议的航模遥控器控制模块,完成对于车体较远距离的遥控通信,提高车体控制实时性与稳定性。
4.根据调试结果,反复调整控制算法中的参数,达到更为精确稳定的控制效果;撰写完善毕业设计论文,准备答辩材料,参加毕业答辩。

问题一:关于平衡车都进行过哪些系统性的学习?
回答:选题是基于闭环五连杆机构的两轮平衡车,围绕这一题目,进行相关文献的检索,系统性地学习了五连杆机构的位置反解与运动学解算,关于车体仿真部分,主要参考了哈尔滨工业大学王洪玺博士的相关论文。
问题二:宇树关节电机是如何实现精确位置控制的?
回答:目前是采用串级PID算法进行位置控制,但串级PID的比例环节与微分环节分别是基于位置偏差,和位置偏差变化率(也即电机转子角速度)进行控制的,故而当电机输出轴处于相对固定的位置时,基于角度误差累积的积分环节发挥主要作用,受限于积分环节的迟滞性,电机对于由车体姿态调整引起的外部力矩突变抗干扰能力差;因此,在下一阶段中,将系统性学习LQR姿态控制算法,为关节电机输出力矩提供前馈,从而实现更精确平稳的控制效果。

参加本次毕业设计中期检查是我在毕业设计整个历程中一次必不可少的重要经历,通过这次答辩,我不仅收获了高屋建瓴式的指导,几位老师的悉心教诲更是令人如坐春风,使我精神大为振奋。本次答辩中,我系统性地阐述了前一时间段进行的工作,使我更清晰明了地把握了毕业设计的整体进度;针对毕业设计过程中遇到问题,进行了详实的分析,并制定了下一步具体行动方案。在总结了现有机械成果与电子器件控制成果的同时,我也意识到了自己单片机调试能力的局限性,然而“路虽远,行则降至”,我相信在下一阶段中,我一定可以利用好逻辑分析仪与调试工具,结合LQR算法,完成平衡车的精确姿态控制。
简而言之,本次中期答辩,促使我鼓起干劲,撸起袖子,优化控制方案,落实姿态控制算法,在老师的谆谆教诲下,取得心仪的成绩。